Multi-Pose Projection Calibration Overview
The QuickCal configuration includes a Multi-Pose workflow to allow for the calibration of objects that move.
Multi-Pose Projection Workflow
-
place the moveable object in a particular position (the “pose”) and then perform a standard quick-calibration.
-
Then rotate the object to a second position.
-
Drag the existing markers to the correct positions and add new ones if necessary, until the projected image is correct and sharp.
-
This process is then repeated for as many poses as are required.
Unlike in the single-pose workflow, we see the dropped calibration points rotate along with the model.
Example
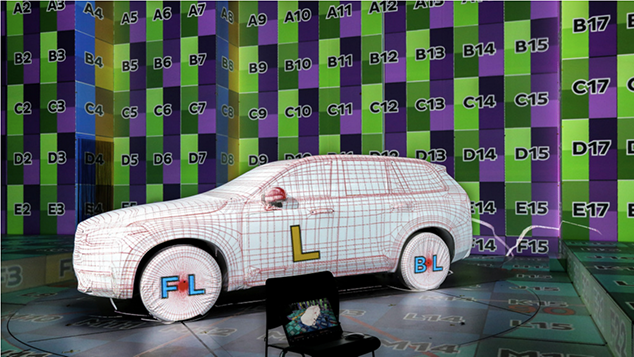
Example application : a car on a rotating turntable, with encoder
In this image, is an example of a car on a motorised turntable. During configuration as the car rotates, the calibrated points gradually drift from their locations on the real model, showing that the calibration isn’t perfect across the space. Once the car is in a new pose, we simply drag the existing markers to the correct positions, and add new ones if necessary, until the projected image is correct and sharp.