Kinesys Driver
Kinesys is a motion control system that provides six axes of freedom (X, Y, Z translation and X, Y, Z rotation). It sends positional and rotational data over the network to Disguise using the UDP protocol.
Designer supports both Vector & K2 products.
The Kinesys Driver is used to receive real-time motion data from Kinesys motors and controllers, allowing physical movement to drive automation or virtual objects inside Disguise. This enables seamless synchronisation between real-world rigging systems and virtual or media-driven elements.
This driver is especially useful when:
- Integrating Kinesys motion systems with virtual production or stage automation.
- Synchronising physical movement (hoists, trusses, screens) with media playback.
- Visualising real-world Kinesys motion in real time within Designer.
- Creating interactive or reactive environments that depend on live motor positions.
- Testing and validating axis behaviour before committing to full show programming.
- Monitoring Kinesys data streams during installation, rehearsal, or operation.
By receiving engine and parameter data directly from K2 or Vector, the driver allows each axis of a Kinesys system to be mapped to corresponding screen or object movement inside Disguise.
Driver Properties
Section titled “Driver Properties”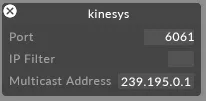
This driver listens on UDP port 6061 by default.
Port
The UDP port on which the driver receives data. Set this to match the port configured on the sending device or controller.
IP filter (optional)
Restricts incoming data to a specific source IP address. Useful when several sources are present on the network, or to isolate a single sender. Leave blank to accept data from any IP.
Multicast address (optional)
The multicast group address used by your system. Only required when the sender is configured for multicast — enter the exact multicast address used by the emitter. Leave empty for unicast or broadcast configurations.
Finding Multicast and Parameter Addresses in Kinesys K2
Section titled “Finding Multicast and Parameter Addresses in Kinesys K2”Outside of Disguise, use the K2 software to locate the engine multicast address and parameter addresses. If you are unfamiliar with the K2 interface, consult your Kinesys representative or operator.
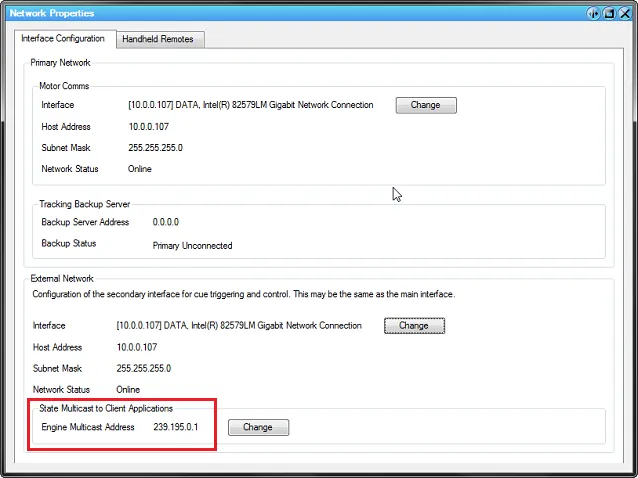
Engine Multicast Address
Section titled “Engine Multicast Address”This is the address used by K2 to broadcast positional data.
It appears in the K2 interface as shown below:
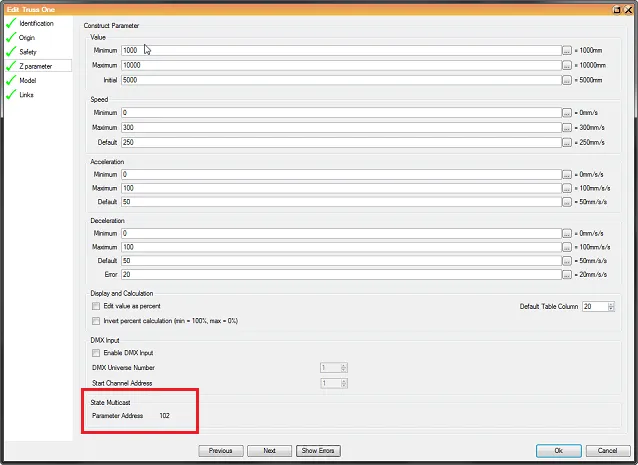
Parameter Address
Section titled “Parameter Address”Each motion parameter (e.g., X, Y, Z, rotation axes) has an individual parameter address.
This acts as the data identifier for each axis.
Configuring the Kinesys Driver in Disguise
Section titled “Configuring the Kinesys Driver in Disguise”- Enter the Engine Multicast Address into the Multicast address field of the Kinesys Driver.
- Create a ScreenPositionAxis object for each axis you wish to control (e.g., Position X, Rotation Z). See Creating PositionAxis objects for more information.
- Copy the K2 Parameter Address for each parameter and paste it into the id field of the corresponding ScreenPositionAxis.
Developer Documentation