MultiPose Projector Calibration
The QuickCal configuration includes a Multi-Pose workflow to improve the calibration of spaces where projection surfaces move or rotate. This is helpful when a surface used for calibration is not fully covering the space in its current pose, or if there are no good visible reference points that cover the whole space. A typical example is a long narrow(ish) object like a car, that is being projected on while being rotated on a turntable.
This workflow is for manual QuickCal calibration, and not to be confused with Multi-Pose Alignment in OmniCal’s QuickAlign, which is for 3D alignment based on automation input.
Multi-Pose Projection Workflow
Section titled “Multi-Pose Projection Workflow”- Ensure that the object’s position and rotation are correctly controlled via an automation system.
- Place the moveable object in a particular position (the “pose”) and then perform a QuickCal calibration, as usual.
- Then use automation to rotate or move the object to a second position. This will change the current 3D position of any existing reference points.
- Line up the existing reference points to the respective correct 2D coordinates for this pose.
- Add and line up new reference points, if necessary, until the projected image is correct and sharp in this pose.
- This process is then repeated for as many poses as are required.
Unlike in the single-pose workflow, we see the reference points rotate along with the model. Once a reference point has been aligned, its 3D position at that time is stored along with the 2D lineup coordinate. When automation input changes the current 3D position of a reference point, it will not affect the previously saved lineups.
Modify an existing pose
Section titled “Modify an existing pose”An existing pose can be modified by moving the object back near a previous position using the automation system. QuickCal has the option to hide markers for poses other than the current one. This may help find an earlier pose. The match does not have to be exact. When a reference point is lined with a 3D position close to an earlier pose, then the earlier pose gets overwritten.
Example
Section titled “Example”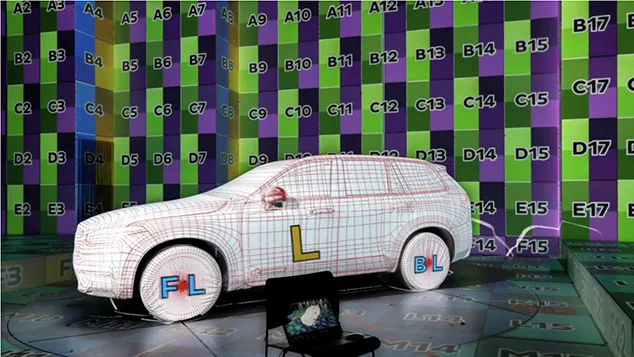
In this image is an example of a car on a motorised turntable. During configuration, as the car rotates, the calibrated points gradually drift from their locations on the real model, showing that the calibration isn’t perfect across the whole space. Once the car is in a new pose, we simply drag the existing markers to the correct positions, and add new ones if necessary, until the projected image is correct and sharp across all possible car positions in the space.
Typically it would be enough to use two poses (e.g. front and side view), so that the extremes of the space are covered by lined up QuickCal points.