API xR Calibration
This topic covers the basic steps of aligning the physical and virtual worlds within Designer, using the API.
What is the API?
Section titled “What is the API?”The xR API is an application programming interface accessible via d3Net that allows direct access to specific software functionality within the Designer software.
Designer version r20 introduced the ability to perform a spatial calibration directly from the API, allowing remote access to the functionality while reducing the number of people required to execute this process to one.
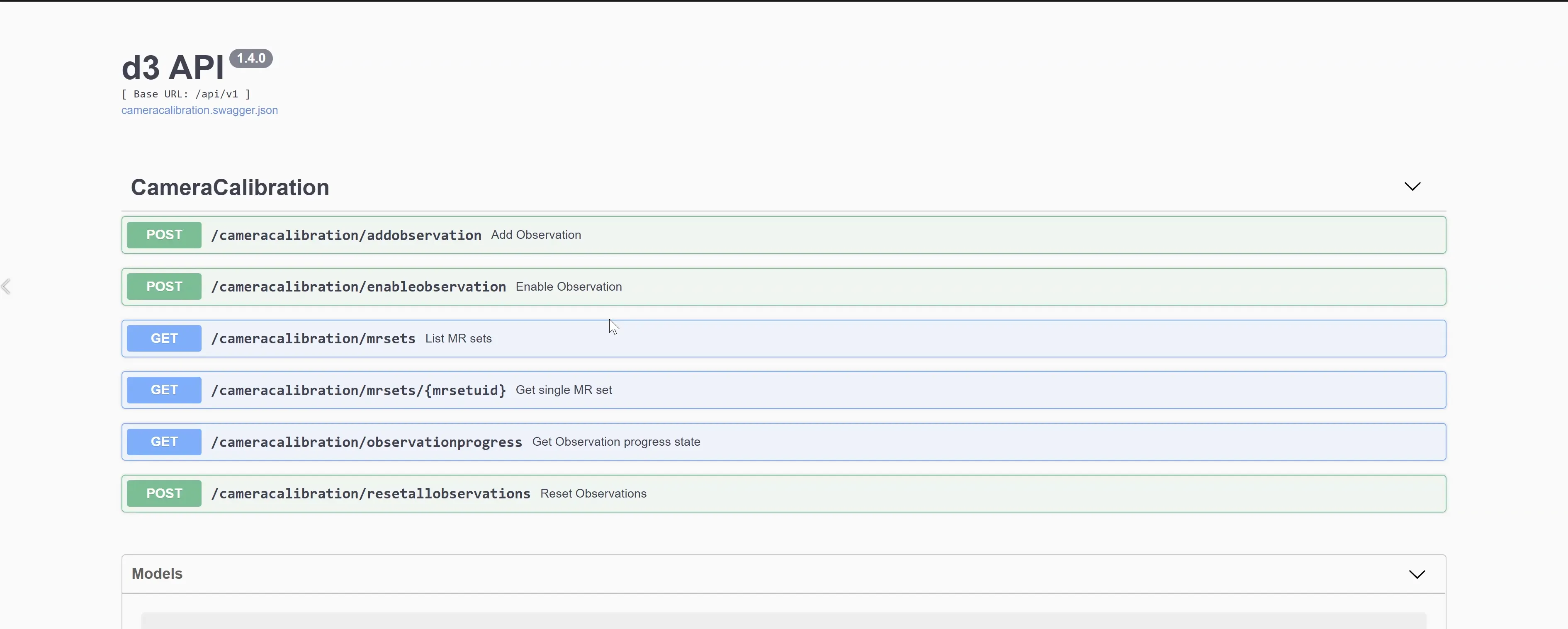
To access the API, navigate to the base URL http://localhost/docs/v1/index.html
Workflow
Section titled “Workflow”A well-calibrated stage will reveal no seams or visual artifacts that break the seamless blend between the real and virtual environments, and with adequate preparation, can be fully calibrated in less than a few hours.
Preparation
Section titled “Preparation”Prior to beginning spatial calibration, ensure that:
- A camera tracking system is set up and is receiving reliable data.
- The xR project has been configured with an MR set, accurate OBJ models of the LED screens, and tracked cameras with video inputs assigned.
- The cameras, LED processors, and all servers are receiving the same genlock signal.
- The feed outputs have been configured and confirmed working.
- The Delay Calibration has been completed.
Calibration
Section titled “Calibration”A Calibration is a set of data that is contained within an individual camera object. The calibration process uses tracking data as a base against structured light patterns to determine the reality in relation to the raw tracking data.
Observations
Section titled “Observations”An observation is a set of images of the stage captured by the camera of white dots on a black background (called structured light). The user determines the number of dots and their size/spacing.
- Observations are used as data points for the predefined algorithm Disguise will use to align the tracked camera with the stage and set up the lens characteristics.
There are two types of observations used in the process: Primary and Secondary (P and S).
-
Primary observations are the positional or spatial observations used to align the real world and virtual cameras. A minimum of five Primary observations is required for the solving method to compute, so aim for five good observations when you begin your calibration process. Primary or secondary status is defined by the most common zoom and focus values in the pool of observations.
-
Secondary observations comprise the zoom and focus data that create the lens intrinsics file. Each new zoom and focus position will create a new Lens Pose.
Taking observations
Section titled “Taking observations”There is no need to assign a zero point in Designer. Minimal offsets and transforms should be applied to align the tracking data and Disguise origin point prior to starting the Primary calibration.
Start by taking primary observations at a single locked zoom and focus level. This Primary Calibration will calibrate the offsets between the tracking system and Disguise’s coordinate system.
-
After each observation, the alignment should look good from the current camera position. If the alignment begins to fail, review all observations and remove suboptimal ones.
-
The Secondary calibration calibrates the zoom and focus data. This will align the virtual content and the real-life camera zoom and focal changes.
Lens Pose
Section titled “Lens Pose”A Lens Pose is the result of the data captured in the observation process. They are different checkpoints that Disguise will intelligently interpolate between. The number of lens poses you will end up with will be dependent on the range of your camera’s lens.
- A new lens pose is created for every new combination of zoom and focus values. The most common zoom/focus combination will be the Primary lens pose, attributed to the Primary calibration.