キャリブレーションエラー
カメラやプロジェクターをキャリブレーションするプロセスには、一連の入力データと、ジオメトリと物理を表現するモデルが必要です。このモデルは、未知のパラメーターによって決定される既知の方程式の集合です。プロジェクターやカメラの場合、モデルには通常、3D の位置と向き、および 焦点距離、lens shift、歪み係数 などのレンズパラメーターが含まれます。
キャリブレーションプロセス中に、入力データのオブザベーションに基づいて、適切なモデルパラメーターが推定されます。
Calibration error は、推定されたモデルパラメーターが入力データにどれだけ適合しているかの尺度です。
Disguise でのキャリブレーションには通常、複数の 2D と 3D のポイントのペアが関与します。これらのポイントペアのソースは、例えば以下のようなものです。
- 手動入力(QuickCal の 2D lineup 位置)
- 自動検出(OmniCal または xR の 2D blob 位置)
- 既存のファイルデータ(QuickCal で使用される 3D メッシュの頂点)
- 再構成された 3D ポイント(OmniCal または xR で自動検出された 2D blob に基づく)
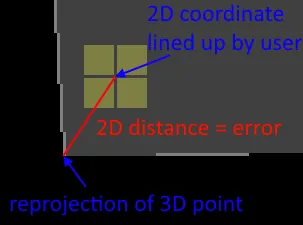
誤差の測定は、多くの場合 Reprojection Error(再投影誤差)として計算されます。入力された 3D ポイントが、キャリブレーションされたモデルの方程式とパラメーターを使用して、プロジェクター(またはカメラ)の画像に投影し戻されます。
結果として得られた 2D ポイントが、元の入力 2D ポイントと比較されます。両者の差(通常は絶対的な 2D 距離)が誤差計算に使用されます。総誤差は、すべてのポイントペアにわたってさまざまな方法で集計されます(以下を参照)。
これらの再投影誤差の単位は通常ピクセルです。
誤差値は低いほど良いです。
通常、1 ピクセル未満の再投影誤差が望ましいですが、状況によってはより高い値が許容される場合もあります。これは、サーフェスの形状、使用するコンテンツ、またはコンテンツがプロジェクションサーフェス上で見える実効解像度に依存する判断です。観客が遠くにいる場合や、解像度が非常に高い場合は、より高い誤差が気づかれないこともあります。
QuickCal では、ユーザーが 2D カーソルを完全なピクセル境界でしか合わせられないため、真のサブピクセル精度を達成するのはより困難です。これにより、どちらの方向にも最大半ピクセルの系統的誤差が生じます。
OmniCal と xR では、カメラ画像内での blob の相対的なサイズにより、2D blob はサブピクセル精度で検出されます。
上記のポイント差から誤差を計算する方法はいくつかあります。
Average or Mean absolute error (Avg)
Section titled “Average or Mean absolute error (Avg)”平均(または mean)誤差は、単に絶対誤差の合計を誤差の数で割ったものです。絶対値を使用するため、負になることはありません。値 0 が完璧な結果です。個々の差は、総平均誤差に比例した影響を与えます。これにより理解しやすく、成功を測る良い尺度になります。
Root Mean Square error (RMSE)
Section titled “Root Mean Square error (RMSE)”RMSE は、個々の誤差を 2 乗した値の平均の平方根です。これも負になることはなく、値 0 が完璧な結果です。個々の差が 2 乗されるため、大きな誤差は総 RMSE に不釣り合いに大きな影響を与えます。その結果、RMSE は外れ値に敏感です。
これが、OmniCal がキャリブレーションステップの前および間に、データセットから外れ値を除去する理由です。RMS 誤差は、プロセスを最良の「方向」へより速く進めるために、キャリブレーション中によく使用されます。しかし、キャリブレーションの最後に成功の尺度としても使用されます。
QuickCal では、RMS 再投影誤差はキャリブレーション完了後に常に再計算されます。一部のアルゴリズムでは、QuickCal はアルゴリズム自体からの内部 RMS 誤差も報告します。UI では、これは「rest」として表示されます。
- 2 つの異なるキャリブレーション入力データセットが、同じ平均誤差を持ちながら、異なる RMS 誤差を持つことが可能です。
- calibration error は、視覚的に説得力のある成功したキャリブレーションを必ずしも保証するものではありません。入力ポイントペアが少数しかない場合、誤差値が低いにもかかわらず、冗長な情報や誤りが非現実的なモデルパラメーターにつながる可能性があります。
Calibration Error の視覚化
Section titled “Calibration Error の視覚化”Designer では、キャリブレーション誤差が何を意味するかをオペレーターがより明確に理解できるように、異なる色が使用されます。
以下は、QuickCal と OmniCal で使用される色と、それらが表す意味の一覧です。意味は、誤差値が RMSE のような総誤差なのか、それとも入力データセットからの単一の 2D/3D ポイントペアのみに対するものなのかによって異なります。誤差値は常にこれらの色のいずれかの間のグラデーションで表されるため、緑がかった黄色は純粋な黄色より良く、純粋な黄色はオレンジより良いです。
| 色 | 誤差 | RMSE での意味 | 個々の ポイントペアでの意味 |
|---|---|---|---|
| 低い誤差 (良好な品質) | キャリブレーションは成功しました。 | キャリブレーションへの良好な寄与。 | |
| 中〜高い誤差 | キャリブレーション品質はぎりぎり許容範囲です。十分に良く見えるかどうかを視覚的に判断する必要があります。 | キャリブレーションへの潜在的に問題のある寄与。 このようなポイントペアが多すぎると、全体のキャリブレーションが十分に良くない可能性があります。 | |
| 高い誤差 | 許容できない品質 | キャリブレーションへの悪い寄与(単一の悪いポイントペアがキャリブレーションを失敗させることがあります)。QuickCal: オペレーターは再整列するか削除すべきです。 OmniCal: オペレーターは outlier handling を使用してそれを除外することを目指すべきです。 | |
| 未キャリブレーション | キャリブレーションが失敗しました。選択したアルゴリズムに対して 2D/3D 入力ポイントペアが十分にありませんでした。入力データが不良/不整合でした。 | キャリブレーションへの寄与なし。 OmniCal: outlier handling により拒否されました。 |