API xR キャリブレーション
このトピックでは、API を使用して Designer 内で物理世界と仮想世界を位置合わせする基本的な手順を説明します。
API とは?
Section titled “API とは?”xR API は、d3Net 経由でアクセスできる Application Programming Interface で、Designer ソフトウェア内の特定の機能に直接アクセスできます。
Designer バージョン r20 で、API から直接空間キャリブレーションを実行できる機能が導入され、この処理に必要な人数を 1 人に減らしながらリモートアクセスが可能になりました。
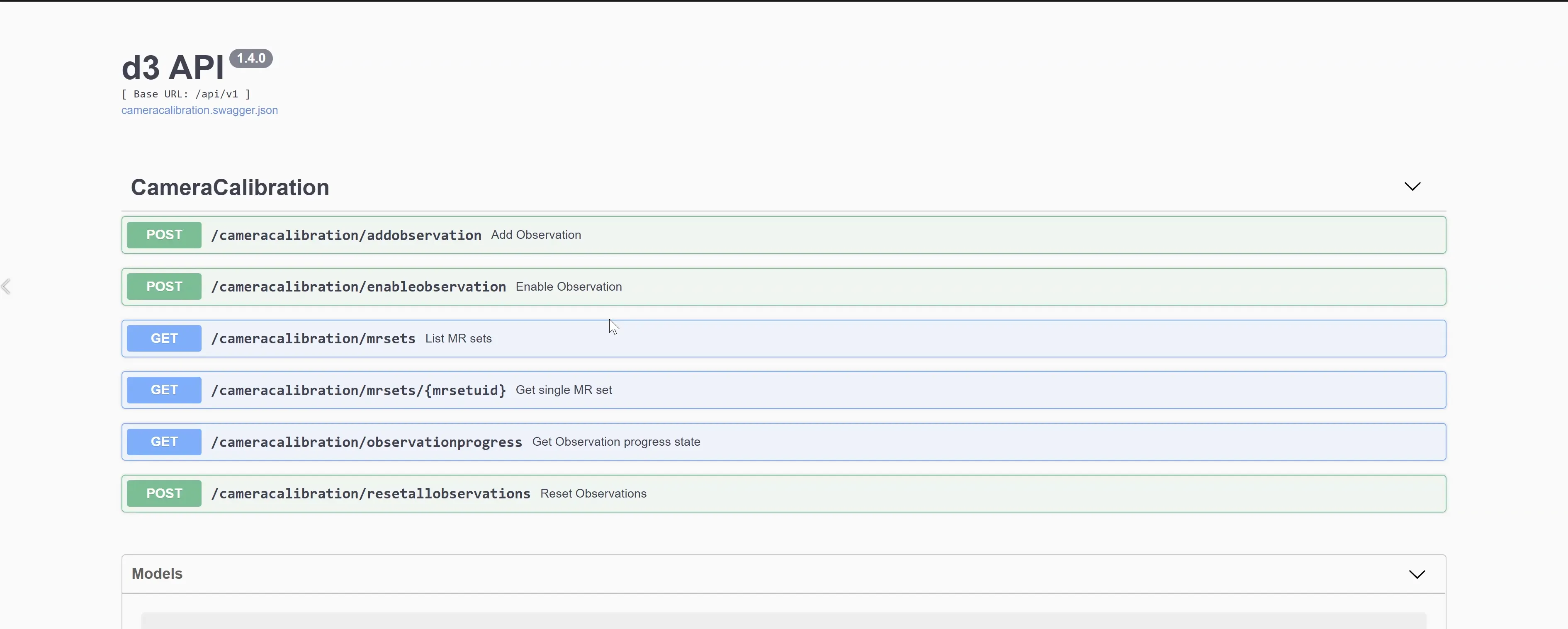
API にアクセスするには、ベース URL http://localhost/docs/v1/index.html に移動します。
ワークフロー
Section titled “ワークフロー”適切にキャリブレーションされたステージでは、現実環境と仮想環境のシームレスなブレンドを損なう継ぎ目や視覚的なアーティファクトが現れません。十分な準備があれば、数時間以内に完全にキャリブレーションできます。
空間キャリブレーションを開始する前に、次の点を確認してください。
- カメラトラッキングシステムがセットアップされ、信頼できるデータを受信していること。
- xR プロジェクトが、MR set、LED スクリーンの正確な OBJ モデル、および ビデオ入力が割り当てられた トラッキング対象カメラ で構成されていること。
- カメラ、LED プロセッサー、すべてのサーバーが同じ genlock 信号を受信していること。
- フィード出力 が構成され、動作が確認されていること。
- Delay Calibration が完了していること。
キャリブレーション
Section titled “キャリブレーション”Calibration は、個々のカメラオブジェクト内に含まれるデータのセットです。キャリブレーション処理では、トラッキングデータをベースに構造化光パターンと照合し、生のトラッキングデータに対する現実を判定します。
観測(Observations)
Section titled “観測(Observations)”観測(observation) は、黒い背景に白いドット(構造化光と呼ばれる)を表示したステージの画像のセットで、カメラによって撮影されます。ドットの数とサイズ/間隔はユーザーが決定します。
- 観測 は、Disguise がトラッキング対象カメラをステージに位置合わせし、レンズの特性をセットアップするために使用する、事前定義されたアルゴリズムのデータポイントとして使われます。
処理で使用される観測には 2 種類あります。プライマリとセカンダリ(P と S) です。
-
プライマリ観測 は、現実世界と仮想のカメラを位置合わせするために使用する位置的・空間的な観測です。解法を計算するには最低 5 つのプライマリ観測が必要なため、キャリブレーション開始時は 5 つの良好な観測を目標にします。プライマリかセカンダリかは、観測プール内で最も一般的なズームとフォーカスの値によって決まります。
-
セカンダリ観測 は、レンズ内部特性ファイルを作成するズームとフォーカスのデータで構成されます。新しいズームとフォーカスの位置ごとに、新しい Lens Pose が作成されます。
Designer でゼロポイントを割り当てる必要はありません。プライマリキャリブレーションを開始する前に、トラッキングデータと Disguise の原点を合わせるためのオフセットや変換は最小限にとどめます。
まず、ズームとフォーカスを 1 つの位置にロックした状態でプライマリ観測を取得します。このプライマリキャリブレーションは、トラッキングシステムと Disguise の座標系との間のオフセットをキャリブレーションします。
-
各観測の後、現在のカメラ位置から位置合わせが良好に見えるはずです。位置合わせが崩れ始めた場合は、すべての観測を見直し、最適でないものを削除します。
-
セカンダリキャリブレーションは、ズームとフォーカスのデータをキャリブレーションします。これにより、仮想コンテンツと実際のカメラのズーム・フォーカスの変化が位置合わせされます。
Lens Pose
Section titled “Lens Pose”Lens Pose は、観測処理で取得されたデータの結果です。これらは、Disguise がインテリジェントに補間する異なるチェックポイントです。最終的に得られる Lens Pose の数は、カメラレンズの範囲によって異なります。
- ズームとフォーカスの値の新しい組み合わせごとに、新しい Lens Pose が作成されます。最も一般的なズーム/フォーカスの組み合わせが Primary Lens Pose となり、Primary キャリブレーションに割り当てられます。