観測点
observation(オブザベーション)とは、黒い背景に白いドット(構造化光と呼ばれる)が表示されたステージを、カメラでキャプチャした一連の画像です。ドットの数とそのサイズ/間隔はユーザーが決定します。
オブザベーションは、spatial calibrator 内のデータポイントとして使用されます。spatial calibrator は、トラッキングされたカメラをステージと位置合わせし、レンズ特性をセットアップするために Disguise が使用する事前定義されたアルゴリズムです。
オブザベーションは primary と secondary に分かれます。primary オブザベーションは、Disguise がカメラの位置と、MR Set を構成するスクリーンの位置を決定できるようにします。また、その primary 構成でレンズ特性も決定します。
secondary オブザベーションは、カメラレンズの可変ズームおよびフォーカス設定に対する Disguise の理解に寄与します。
オブザベーションの追加は累積的なプロセスであり、各「primary」オブザベーションは全体のキャリブレーション結果に等しく影響します。これは、1 つの悪いオブザベーションが全体を台無しにする可能性があることを意味しますが、それは修正のために私たちが把握したいことです。全体の primary キャリブレーションを改善するか悪化させるかを判断するために、各オブザベーションを取得した後に確認することが極めて重要です。
ワークフロー
Section titled “ワークフロー”- カメラトラッキングデータを確認します。
- 最初のカメラ位置を設定します。
- キャリブレーションするターゲットカメラを選択します。
- spatial calibration を選択します。
- live blob preview を使用します。
- 最初のズーム位置を設定します。
- カメラをフォーカスします。
- ズームとフォーカスの値をロックします(オプション)。
- キャリブレーションウィジェットで adjust screen position をオンまたはオフに設定します。
- 最初のオブザベーションを追加します。
- オブザベーションの問題をトラブルシューティングします。
- オブザベーションを削除します(必要に応じて)。
- オブザベーションをリセットします(必要に応じて)。
- 新しい位置からさらにオブザベーションを追加します。
- secondary オブザベーションについてプロセスを繰り返します。
- ズームの補間をテストします。
カメラトラッキングデータの確認
Section titled “カメラトラッキングデータの確認”- カメラトラッキングシステムがその位置ドットを認識でき、良好なデータを出力していることを確認します。
- ズームとフォーカスのエンコーダー情報が Disguise に届いていることを確認します。カメラのエンコーダーを動かして、automation monitor での変化を確認します。
- 各軸で正しい動きを受信していることを確認します。カメラを x、y、z 軸に沿って動かし、pan、tilt、roll(可能な場合)を行い、Designer 内の仮想カメラの動きが実世界の動きと一致することを確認します。
最初のカメラ位置の設定
Section titled “最初のカメラ位置の設定”- 床のどこから最初のオブザベーションを取得するかを選びます。位置を選んでカメラを固定します。
フレームから負の空間(ネガティブスペース)をできるだけ取り除き、モニターをできるだけ多くの LED で埋めるようにします。
- キャリブレーションしたいターゲットカメラを選択します。
- MR set で Spatial Calibration を選択します。
- Live Blob Preview ツールを使用して、blob がステージ上にあることを視覚的に確認します。
- 必要な最初のズームレベルまでカメラをズームアウトして、最初のズーム位置を設定します。
- カメラをフォーカスします。
- キャリブレーションがカメラと LED スクリーンの両方の位置を設定するか(デフォルトでオン)、カメラ位置のみを設定するか(デフォルトでオフ)を設定します。これはキャリブレーションエディターで行えます。
複数のスクリーンで構成されるステージの場合、mr set の一覧の一番上のスクリーンがメインスクリーンになり、他のスクリーンとカメラがその周りを動く間、変更されずに維持されます。MR Set をモニターで監視すると、virtual line up レイヤーが所定の位置にポップインし、LED が出力しているテストパターンと位置合わせされるのが見えるはずです。
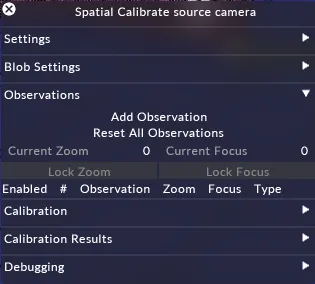
- Add Observation をクリックします。
Designer はステージに blob パターンを表示し、表示された blob をキャプチャします。オブザベーションが終了すると、それがオブザベーション一覧に表示されます。
最初の位置からさらにオブザベーションを追加する
Section titled “最初の位置からさらにオブザベーションを追加する”オブザベーションを追加していくと、それらがオブザベーション一覧に表示されます。Disguise は一覧内のすべてのオブザベーションを自動的にキャリブレーションします。
- オブザベーションがキャリブレーションに与える影響を A/B テストするには、オブザベーション一覧からオブザベーションをミュートまたは削除できます。
- 最初のオブザベーションを取得した後、同じ場所からカメラをセットの異なる場所に向けて、追加のオブザベーションを取得します。
- 左右にパンし、上下にトラッキングして、ショーで使用するすべてのピクセルをカバーするようにします。
新しい位置からさらにオブザベーションを追加する
Section titled “新しい位置からさらにオブザベーションを追加する”- 次に、カメラを他の位置に移動し、ズーム 0 レベル、フォーカス 0 から開始して、他の角度からすべてのピクセルをカバーするようにします。
- MR Set Output を監視し、virtual line up レイヤーが所定の位置からずれて表示されるのに気づいたら、その地点でオブザベーションを取得します。
secondary オブザベーション
Section titled “secondary オブザベーション”- primary オブザベーションがキャリブレーションされたので、次にショーで必要な次のズームとフォーカスレベルで上記の手順を繰り返します。
- Disguise はズームとフォーカスレベル間の補間を自動的に計算します。
- 必要なズームとフォーカスレベルの数だけ、これらの手順を繰り返します。
- 各オブザベーションの後に、ズームとフォーカスの値が、同じズーム/フォーカスレベルで取得した他のオブザベーションの値と一致することを確認します。一致しない場合は、一致するようにズーム/フォーカス値を編集します。
ズーム補間のテスト
Section titled “ズーム補間のテスト”Designer が異なるズーム位置間で補間しているかをテストするには、カメラをズームイン・ズームアウトして MR Set を観察します。Designer が正しく補間していれば、virtual line up レイヤーはカメラとともにズームインし、ステージ上のテストパターンに張り付くはずです。
オブザベーションのトラブルシューティング
Section titled “オブザベーションのトラブルシューティング”オブザベーションがなぜ悪いのかを理解するには、observation debugger を使用します。
Current Observation パラメーターを使用すると、キャプチャしたオブザベーションを順に確認できます。異なる色の四角形が blob に重ねて表示され、blob がどのスクリーンで見られたかを Designer が区別するのに役立ちます。
spatial calibration 設定の dot size と grid spacing パラメーターを増減することで、Designer が認識できる blob を修正できます。
ユーザーは Tracker Distortion Compensation を Matrix に変更できます。これにより、別の方法でキャリブレーションを解決しようとします。
オブザベーションの削除
Section titled “オブザベーションの削除”オブザベーションを削除すると、オブザベーション一覧から削除されます。
オブザベーションを削除するには
Section titled “オブザベーションを削除するには”- オブザベーションの隣のゴミ箱アイコンを左クリックして削除します。
すべてのオブザベーションのリセット
Section titled “すべてのオブザベーションのリセット”1 つずつ削除するのではなく、すべてのオブザベーションをリセットすることも可能です。Reset all Observations は、カメラの spatial calibration を完全にリセットします。このボタンをクリックすると確認が必要です。