MultiPose プロジェクターキャリブレーション
QuickCal の構成には、プロジェクションサーフェスが移動または回転する空間のキャリブレーションを改善するための Multi-Pose ワークフローが含まれています。 これは、キャリブレーションに使用するサーフェスが現在のポーズで空間を完全にはカバーしていない場合や、空間全体をカバーする良好に見える reference point がない場合に役立ちます。 典型的な例は、ターンテーブルで回転させながら投影される、車のような細長い(やや)オブジェクトです。
このワークフローは手動の QuickCal キャリブレーション用であり、3D アライメントを自動化入力に基づいて行う OmniCal の QuickAlign の Multi-Pose Alignment と混同しないでください。
Multi-Pose プロジェクションワークフロー
Section titled “Multi-Pose プロジェクションワークフロー”- オブジェクトの位置と回転が、自動化システムによって正しく制御されていることを確認します。
- 可動オブジェクトを特定の位置(「ポーズ」)に配置し、通常どおり QuickCal キャリブレーションを実行します。
- 次に、自動化を使用してオブジェクトを 2 つ目の位置に回転または移動します。これにより、既存の reference point の現在の 3D 位置が変わります。
- 既存の reference point を、このポーズのそれぞれ正しい 2D 座標に合わせます。
- 必要に応じて、このポーズで投影画像が正確かつ鮮明になるまで、新しい reference point を追加して合わせます。
- このプロセスを、必要なポーズの数だけ繰り返します。
single-pose ワークフローとは異なり、reference point がモデルとともに回転するのが見られます。 reference point が一度合わせられると、そのときの 3D 位置が 2D lineup 座標とともに保存されます。自動化入力が reference point の現在の 3D 位置を変更しても、以前に保存された lineup には影響しません。
既存のポーズを変更する
Section titled “既存のポーズを変更する”既存のポーズは、自動化システムを使用してオブジェクトを以前の位置の近くに戻すことで変更できます。QuickCal には、現在のポーズ以外のポーズのマーカーを非表示にするオプションがあります。これは以前のポーズを見つけるのに役立つことがあります。 一致は正確である必要はありません。reference point が以前のポーズに近い 3D 位置で合わせられると、以前のポーズが上書きされます。
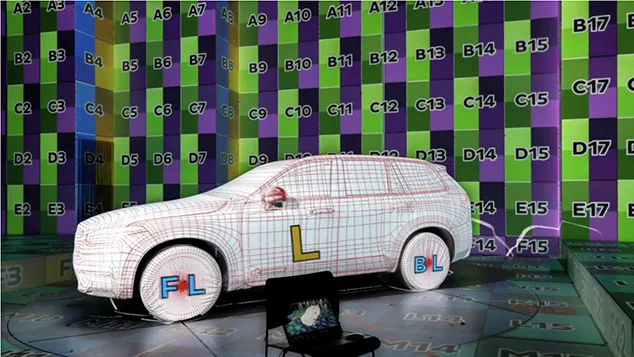
この画像は、電動ターンテーブル上の車の例です。構成中、車が回転するにつれて、キャリブレーションされたポイントが実モデル上の位置から次第にドリフトし、キャリブレーションが空間全体で完璧ではないことを示しています。 車が新しいポーズになったら、空間内のすべての可能な車の位置で投影画像が正確かつ鮮明になるまで、既存のマーカーを正しい位置にドラッグし、必要に応じて新しいマーカーを追加するだけです。
通常、2 つのポーズ(例: 正面図と側面図)を使用すれば、空間の両端が lineup された QuickCal ポイントでカバーされるので十分です。