OmniCal の概要
OmniCal は、プロジェクションマッピングプロジェクト向けの高度なカメラベースのシステムです。プロジェクションのセットアップを計画し、プロジェクターを Designer の座標系にキャリブレーション・整列し、プロジェクションサーフェスを整列し、メッシュの不整合を調整し、キャプチャした点群(point cloud)に基づいてメッシュを変形するツールを含みます。
強力な 3D ワークフローの大きな悩みの 1 つは、常に正確な 3D モデルを得て、それらをキャリブレーションすることでした。これまでの解決策は、レーザースキャンや、3D メッシュと現実の間に不整合が見つかったときに CAD モデルを修正できる熟練の CAD 担当者を現場に置くことに基づいていました。
OmniCal は、その強力なキャリブレーションと Mesh Deform ツールを使用して、正確な 3D モデルを持つ必要性を取り除きます。
製品情報の全文は、この Technical Specifications ドキュメントでご覧ください。

-
Ethernet ベースの接続 を使用した、堅牢で信頼性の高い カメラ。
-
OmniCal は構造化光パターンの画像を キャプチャ して、プロジェクションサーフェスの 3D 表現を点群として構築します。
-
点群を使用して、プロジェクションサーフェス、プロジェクター、カメラの間の関係を キャリブレーション します。
-
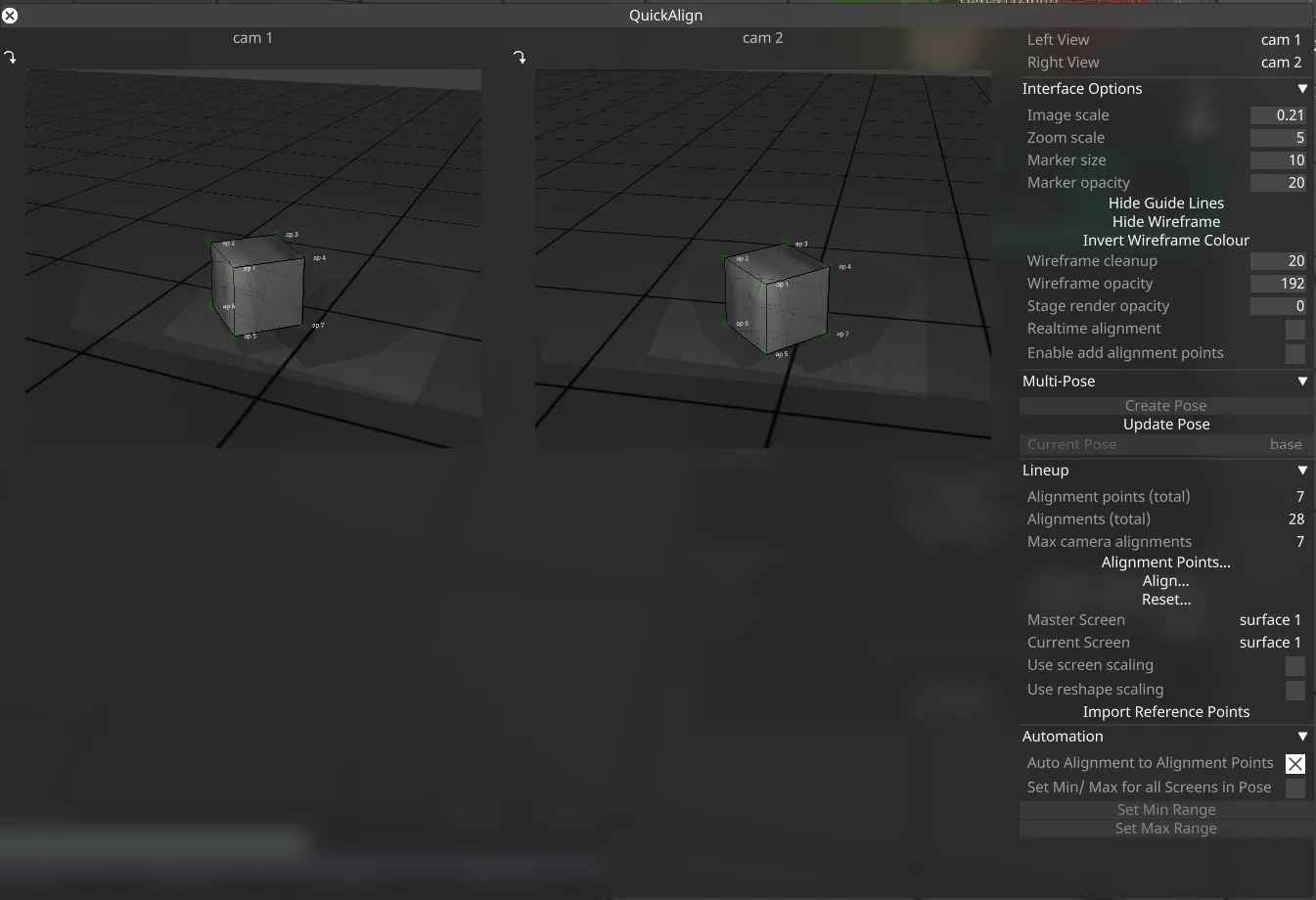
QuickAlign ツールは、Designer プロジェクト内のプロジェクションサーフェスを、実世界の位置と比率に一致するように手動で整列するのを助けます。これは物理ステージへのアクセスを必要としない「オフライン」プロセスです。相対的なポーズが事前にわからない場合、複数のシーンオブジェクト を別々に整列できます。
-
ワンクリックの Mesh Deform ツール は、(点群データを使用して)3D モデルを実世界に一致するように変形します。
-
RigCheck は簡単な再キャリブレーションツールを提供します。前回のキャリブレーション以降にプロジェクターのみが動いた場合は、これはワンクリックです。カメラやプロジェクションサーフェスが動いた場合は、オペレーターが新しくキャプチャしたカメラ画像を使用して以前の整列を調整する必要があります。
-
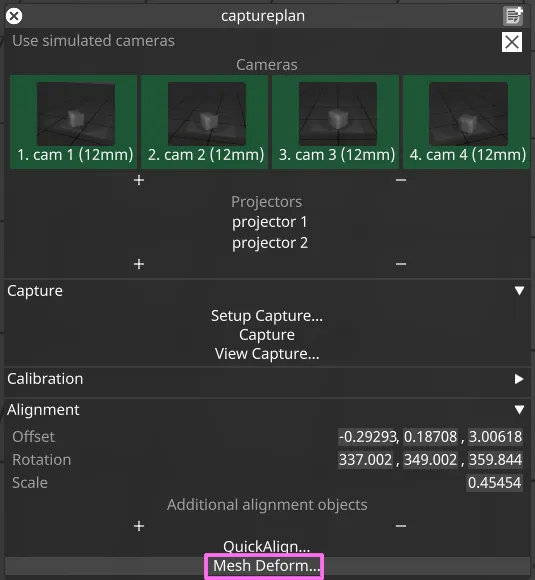
OmniCal シミュレーションワークフローでは、シミュレートされたカメラとレンズで計画を立て、そのカバレッジを表示し、テストキャリブレーションを実行して、システムとカメラのセットアップが現場で必要なとおりに機能するかを確認できます。
-
360° プロジェクション環境をサポートします。
-
3D 深度を持つサーフェスやシーンのキャリブレーション用に設計されています。
ハードウェア
Section titled “ハードウェア”OmniCal machine vision (MV) システムは、複数の Disguise OmniCal カメラ と 適切なレンズ で構成され、4 つの field-of-view オプションから選択できます。
標準的な Ethernet 技術と Power over Ethernet (PoE) の使用は、固定設置に理想的な、信頼性が高くメンテナンスの少ないシステムに貢献します。
OmniCal MV システムは、プロジェクトの要件に応じて、最大 4 台または 8 台のカメラのキット、またはカスタム構成で販売されます。詳細については、OmniCal Wired Kits を参照してください。
現在の制限事項
Section titled “現在の制限事項”- キャリブレーションの品質は、適切な照明条件があるかどうかに依存します。
- キャプチャプロセス中、一定の光レベルが必要です。
- 周囲光のレベルが低いと最もよく機能します。
- 上記のとおり、プロジェクトの適合性を確認するために、まずシミュレーションを実行する必要があります。大規模なプロジェクトでは、プロジェクターのグループごとに別々のキャリブレーションを行い、グループ間の重なりを手動でブレンドすることをお勧めします。
- 非反射性で不透明なプロジェクションサーフェスが必要です(ガーゼやミラーは不可)。
- 3D メッシュと実オブジェクトに、カメラ画像上で視覚的に識別できる、明確に定義された特徴点がいくつか必要です。例えば、鋭い角を持つプロジェクションサーフェスはうまく機能しますが、特徴のない滑らかなサーフェスは機能しません。
- OmniCal はプロジェクターの視点からの深度を必要とします。Automation などの移動要素を使用する場合、シーンの深度は特に重要です。
ワークフロー
Section titled “ワークフロー”訓練を受けた OmniCal オペレーター向け
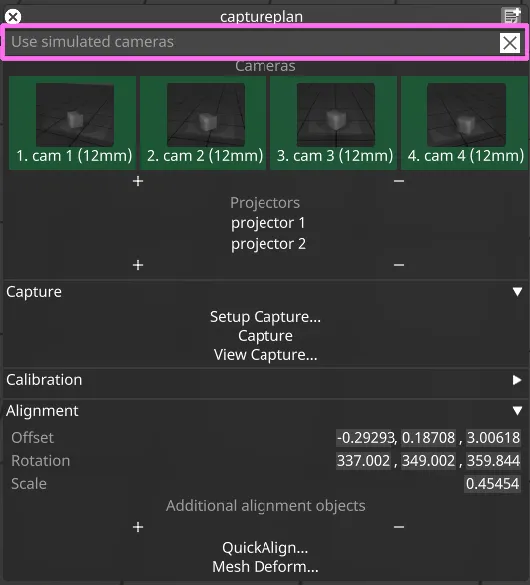
Section titled “訓練を受けた OmniCal オペレーター向け”シミュレートされた Camera Plan を作成する
Section titled “シミュレートされた Camera Plan を作成する”- Disguise シミュレーターを使用して、プロジェクトの適合性を確認します。
- 仮想カメラを配置し、capture と calibration をシミュレートできます。現場と同じ構成・位置にプロジェクターとプロジェクションサーフェスを配置したプロジェクトファイルが必要です。
- カメラ配置の基本ルールは、プロジェクションサーフェス上のすべての点を少なくとも 2 台のカメラが見る必要があるということです。また、カメラは大きな角度の隔たりを持つべきです。つまり、向く方向が平行であってはなりません。
- シミュレーションは、必要なカメラの数、その位置とレンズ、キャリブレーションパラメーターを決定するのに役立ちます。また、現場で期待すべき理想的なキャリブレーション結果も示します。なお、これらの理想的な結果は、不適切な照明条件、反射、オクルージョン、キャプチャ中のシーンの動きなどの実世界の影響がない場合のものです。
現場でカメラをセットアップする
Section titled “現場でカメラをセットアップする”- 実カメラの位置、向き、field-of-view が、シミュレートされた Camera Plan に一致することを確認する必要があります。これを助けるために、カメラが何を見ているかを示すカメラセットアップエディターがあります。
- OmniCal MV システムを取り付ける際、シーンの画像が鮮明で適切に露出されるように、レンズの物理的なフォーカスと絞り(iris)を手動で調整する必要があります。露出時間は Disguise 内から制御できます。
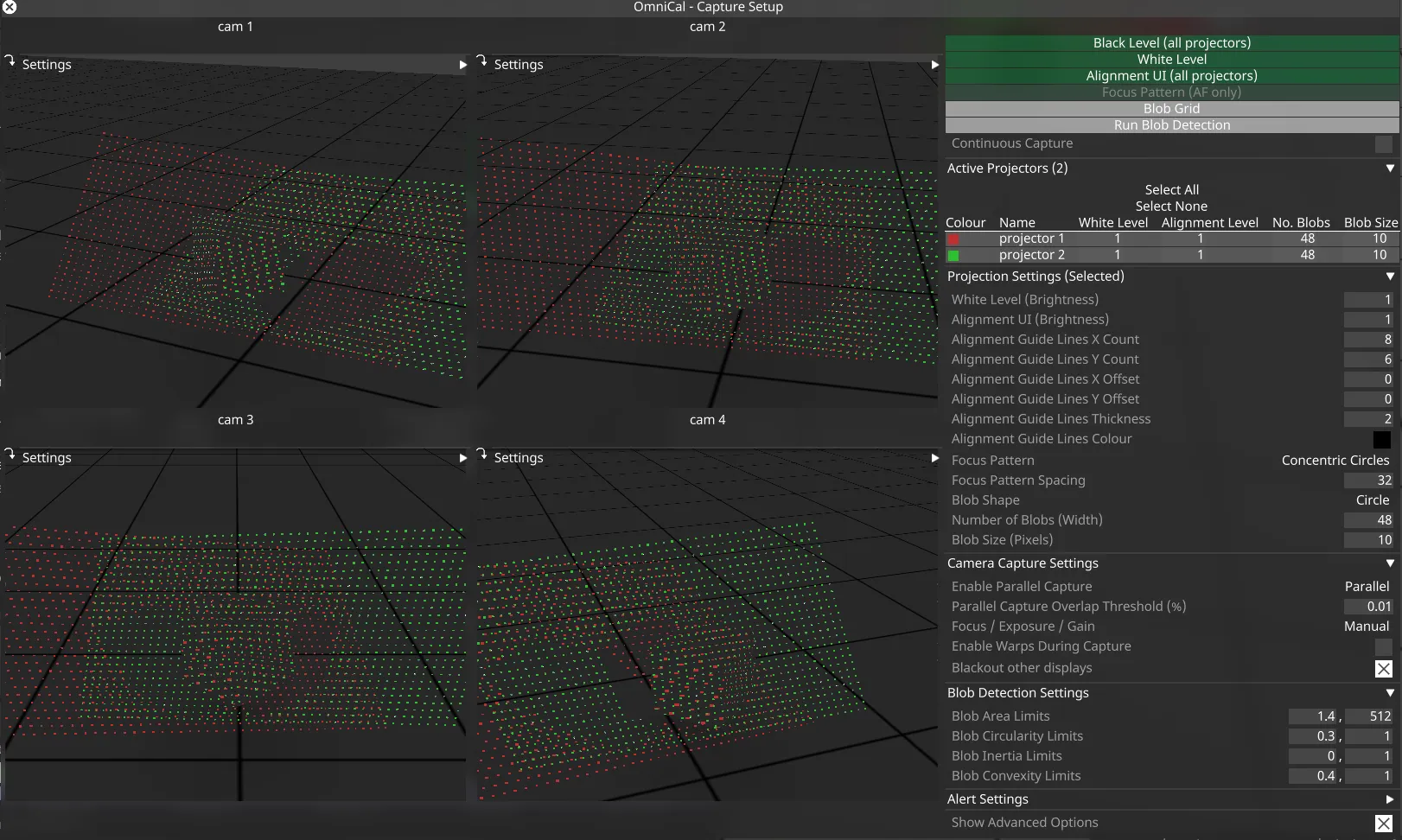
- Capture Setup ツールから、Blob Detection がどれだけうまく機能しているかを確認します。Blob は、構造化光パターンで投影されるドットです。
- 最良の結果を得るために、光レベルに応じてカメラパラメーター(露出時間など)を調整する必要があるかもしれません。
Capture
Section titled “Capture”- Capture は自動の「ワンボタン」プロセスで、通常 1 分未満で完了します。正確な所要時間は、プロジェクターとカメラの数、および構造化光パターンの解像度(blob の数)に依存します。
- これが完了すると、物理ステージは解放されます。次の手順は「オフライン」で実行できます。

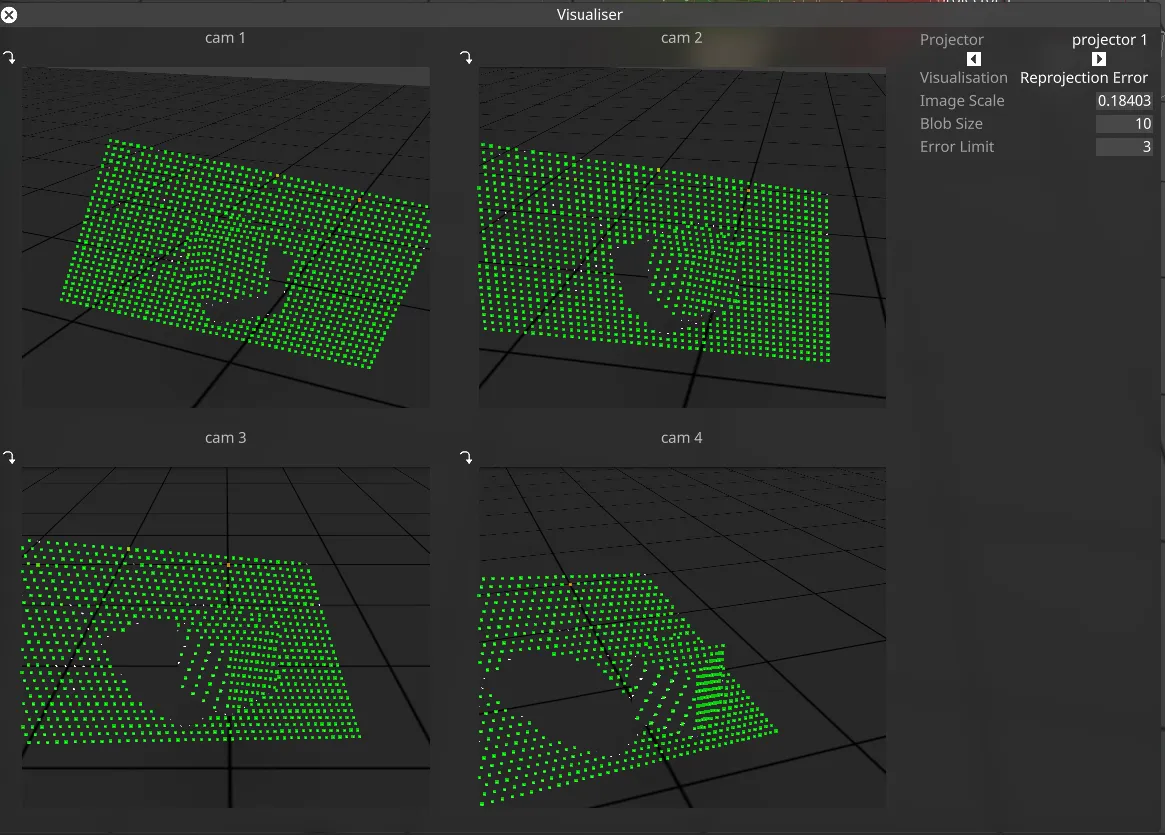
Calibration
Section titled “Calibration”- この段階の後、点群を表示し、各プロジェクターのキャリブレーション誤差をピクセル単位で確認できます。
- 最良の結果を得るためにキャリブレーションパラメーターを調整する必要があるかもしれませんが、通常はこれらは自動的に選択されます。
Alignment
Section titled “Alignment”- これは、点群を Disguise 内のプロジェクションサーフェスと整列する手動ステップです。
- ユーザーはカメラ画像にアライメントポイントを追加して、プロジェクションサーフェスのワイヤーフレームビューを現実に合わせます。
- これは、カメラやプロジェクションサーフェスが動かない限り、1 回だけ行えば済みます。
- メッシュの形状を補正するために Re-shape ポイントを追加することもできます。これは、カメラの視点からの 3D ワープと考えることができます。
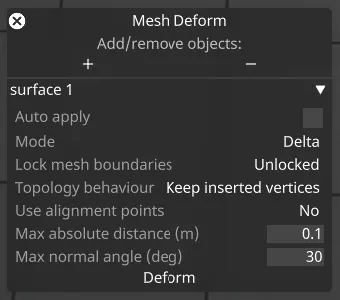
Mesh Deform
Section titled “Mesh Deform”これは、点群からの深度情報を使用して、Designer 内のメッシュを実世界に一致するように変形する、最後の重要なステップです。
訓練を受けていないオペレーター向け(再キャリブレーション)
Section titled “訓練を受けていないオペレーター向け(再キャリブレーション)”Camera Plan を選択する
Section titled “Camera Plan を選択する”ユーザーは、訓練を受けたオペレーターが以前に作成した、Capture、Calibration、Alignment の既知の良好な設定を含む Camera Plan を選択します。
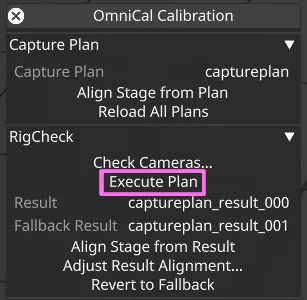
Rig Check
Section titled “Rig Check”このツールを使用すると、ライブのカメラ画像を以前の Capture のものと比較して、カメラやプロジェクションサーフェスが動いたかどうかを確認できます。動いた場合、ユーザーはアライメント reference point を正しい位置にドラッグして調整できます。
Execute Plan
Section titled “Execute Plan”- Camera Plan の設定を使用して、新しい Capture と Calibration をトリガーするボタンです。
- この時点以降、ユーザーの操作は必要ありません。このプロセスの最後に、プロジェクターが自動的にキャリブレーションされます。
ヒントとコツ
Section titled “ヒントとコツ”-
良いキャリブレーションができたかを素早く知る方法は、キャリブレーションレポート(一番下にあります)で各プロジェクターとカメラの再投影スコアを見ることです。1 ピクセル未満のスコアは、QuickCal を使用するときに許容される誤差範囲と同様に、良好とみなされます。
-
1 ピクセルを超える値は通常、何かがうまくいかなかったことを示します。シミュレーションでは、通常約 0.5 ピクセル以下の誤差が見られます。
-
反射面はキャリブレーションに問題を引き起こす可能性があるため避けてください。
-
深度の特徴が多いサーフェスは、キャリブレーションをより正確にするので使用してください。各プロジェクターの「視点」から深度を持つことが特に重要です。例えば、あるプロジェクターから見えるすべての blob が平らなサーフェスに当たる場合、正しくキャリブレーションされません。これを修正する 1 つの方法は、キャプチャ中に環境内に一時的にオブジェクトを配置して深度情報を提供することです。
-
各 blob は、キャリブレーションに使用されるために少なくとも 2 台のカメラに見える必要があります。
-
プロジェクターの出力全体にわたって blob が見えるようにしてください。例えば、プロジェクターの左上からの blob のみが検出される場合、正しくキャリブレーションされません。
-
カメラ間の攻撃角度(angles of attack)に大きな差を確保してください。
-
Capture Setup は良好な blob detection に重要です。環境に合わせて、blob サイズ、グリッド密度、カメラ露出を変更する必要が最も多いでしょう。
-
blob は、カメラに検出される限りできるだけ小さくすべきです。これによりキャリブレーション精度が向上します。また、大きすぎるとまったく検出されません。
-
細長い blob はキャリブレーション誤差を高める可能性があります。これに対処するには blob サイズを小さくしてみてください。プロジェクターとプロジェクションサーフェスの法線の間の大きな角度(例: 45 度)は避けてください。
-
blob が多いほど良いキャリブレーションになるわけではありません。通常、デフォルトのグリッドサイズ 32 で十分です。Mesh Deform 用に詳細な点群が必要な場合は、より多くの blob を使用してください。
-
照明のグラデーションは避けてください。画像全体で光レベルが変化すると、blob detection がうまく機能しないことがあります。
-
完全に平らなサーフェスをキャリブレーションして奇妙な結果が出る場合は、Plan の Calibration Setup ウィンドウで epipolar/homography カメラキャリブレーションアルゴリズムを切り替えて、より良い結果が得られるか確認してください。
-
ほとんどの blob が平らなサーフェスに当たっている場合、これらのエリアに有利にキャリブレーション結果が偏ることがあります。Plan の Calibration Setup ウィンドウで planar point removal を有効にすると、結果が改善されることがあります。
-
幾何学的に対称な形状(立方体 / ピラミッド / ボウル形状)を line up するのは難しいことがあります。OBJ に特徴や識別用の文字・数字を埋め込むことができます。また、QuickAlign ウィンドウで reference point に名前を付けることもできます。
-
ドームやシリンダーなど、角や見える reference point のないサーフェスは line up が困難です。
-
mesh deform を使用する必要がある場合は、点群可視化モードを使用して結果をプレビューしてください。
-
点群可視化はパフォーマンスに影響します。キャリブレーションの妥当性を検証したら、良好なパフォーマンスを確保するためにオフにしてください。
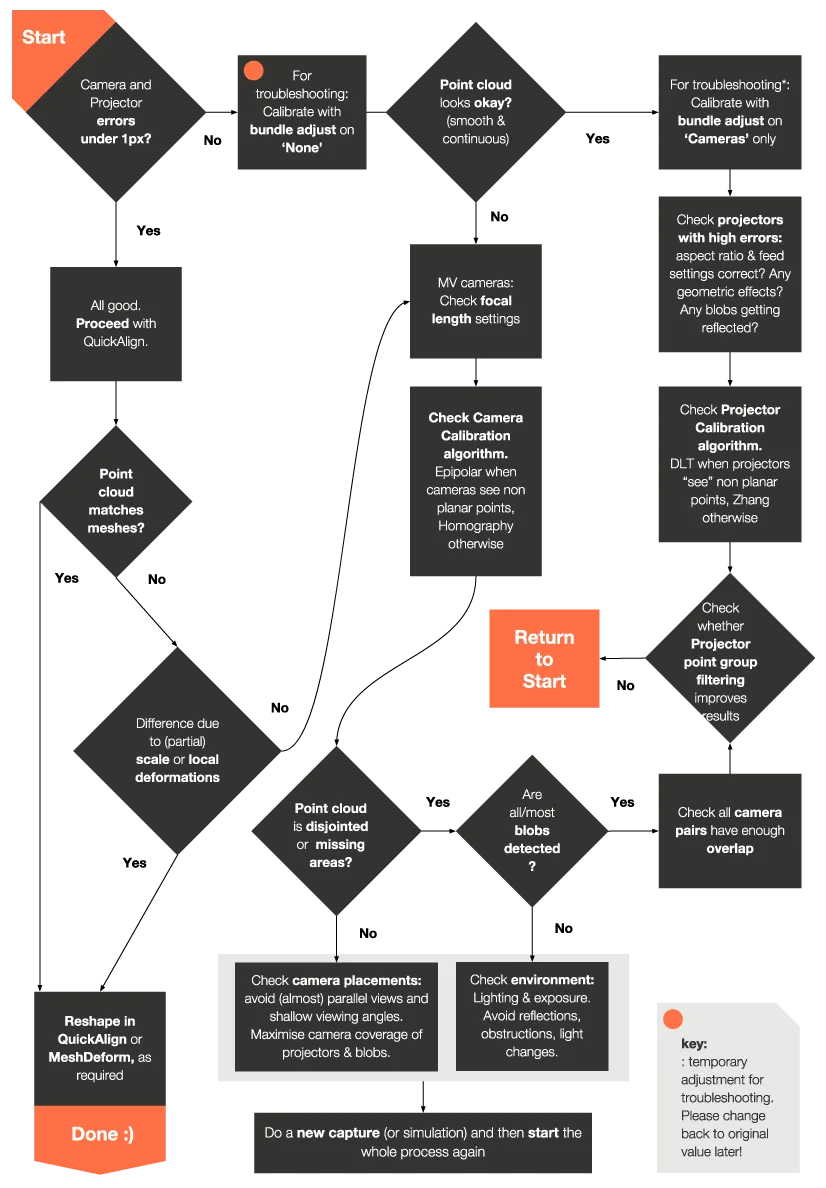
トラブルシューティング
Section titled “トラブルシューティング”